Dobb·E
About Dobb·E
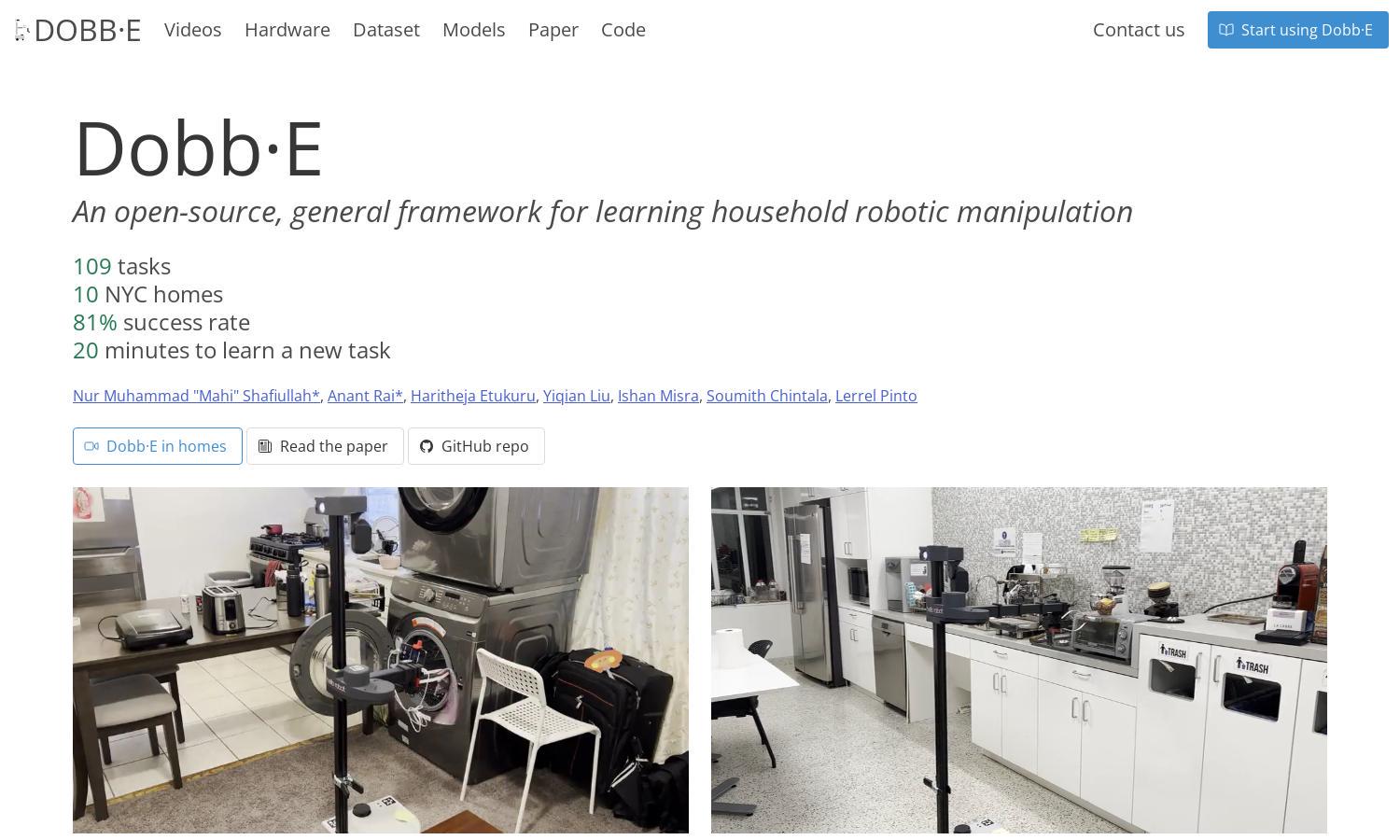
Dobb·E empowers users to teach robots household tasks efficiently through imitation learning. With just five minutes of demonstrations, users can utilize the Stick tool to collect data and train the robot in a novel environment. Achieving an 81% success rate, Dobb·E enhances home robotics integration.
Dobb·E is available as an open-source platform, allowing users to access the framework at no charge. The community-driven approach ensures continuous improvements and updates. As there are no subscription tiers, users can freely trial and integrate Dobb·E into their projects, maximizing value without financial commitments.
Dobb·E features a user-friendly interface designed for seamless interaction. Its intuitive layout allows users to navigate easily through training modules and collected data. The platform is designed to enhance user experience, focusing on accessibility and efficiency, making it ideal for both beginners and advanced users in robotics.
How Dobb·E works
Users interact with Dobb·E by first collecting demonstrations of tasks they want the robot to learn using the Stick tool. After gathering five minutes of data, the collected information is used to adapt the Home Pretrained Representations (HPR) model within a new home environment. Dobb·E streamlines the process of robotic training, allowing users to achieve an impressive 81% success rate in task completion, thus simplifying the integration of robots into everyday household functions.
Key Features for Dobb·E
Imitation Learning
Dobb·E's core functionality lies in its imitation learning capability, allowing robots to learn new household tasks quickly and efficiently. This innovative approach uses minimal demonstration time, enabling users to adapt robots to various environments and tasks with remarkable success rates, enhancing home automation.
The Stick Tool
Dobb·E features a unique demonstration collection tool known as the Stick, which simplifies the process of collecting task demonstrations. Made from affordable components, this innovative tool enables users to gather data easily, making it a vital asset for training robots effectively in various household contexts.
Home Pretrained Representations (HPR)
Home Pretrained Representations (HPR) is a distinct feature of Dobb·E, providing a pre-trained model that accelerates robot learning tasks. By utilizing extensive datasets gathered from real homes, HPR enables efficient task adaptation in new settings, ensuring a smoother integration of robotic solutions into everyday households.
You may also like: